

我所科研人员在无人帆船路径规划算法领域取得新进展
近日,我所科研团队围绕无人帆船在复杂海洋环境中的自主航行需求,在混合风场条件下的路径规划方法研究方面取得重要进展。研究团队针对无人帆船受风驱动、欠驱动、航行策略受限等特点,提出了一种动态启发式路径规划算法(Dynamic Heuristic Path Planning, DHPP),有效解决了传统路径规划方法在复杂风场中航行效率低、计算代价高以及规划结果难以实际执行的问题。
风场是影响无人帆船航行性能与任务可靠性的核心环境因素。与常规动力船舶不同,无人帆船完全依赖风能推进,其可达航向、航速分布及航行策略均受到风速和风向的强烈约束。在混合风场环境中,风速与风向在空间上呈现显著非均匀性,使得传统以最短路径或单一时间代价为目标的规划算法难以兼顾航行可行性与效率,甚至可能生成无法执行的路径。
针对上述问题,研究团队在人工势场与启发式搜索框架基础上,引入速度极曲线(Velocity Polar Diagram)与速度预测程序(VPP),构建了面向无人帆船航行特性的路径评估模型。在此基础上,DHPP 算法设计了时间、距离与速度三类估计质量函数,并进一步提出自适应权重调节机制,使算法能够根据局部风场条件与航行状态动态调整规划策略,在不同风况下灵活权衡航行时间、路径长度与速度稳定性。
结果表明,在简单风场环境中,DHPP 算法在保持航行时间与传统方法相当的前提下,显著提升了计算效率,搜索节点数与运行时间均明显降低。在混合风场环境中,与 开源软件OpenCPN 中采用的路径规划算法相比,DHPP 算法在航行时间、计算效率和路径质量方面均表现出显著优势。同时,DHPP 规划路径在速度变化幅度和航行稳定性方面表现更优,更符合无人帆船的实际航行特性。研究结果表明,DHPP 算法能够在复杂风场条件下实现航行可行性、时间最优性与计算效率之间的有效平衡,为无人帆船在长航时、自主化和跨海域任务中的稳定运行提供了新的技术支撑。该方法在海洋观测、环境监测和智能航行等应用场景中具有良好的推广前景。
相关研究成果已发表于知名期刊《Ocean Engineering》,第一及通讯作者为我所海气中心正高级工程师宁春林,第二作者为该中心硕士研究生姚梓豪。
论文链接:
https://doi.org/10.1016/j.oceaneng.2025.123961
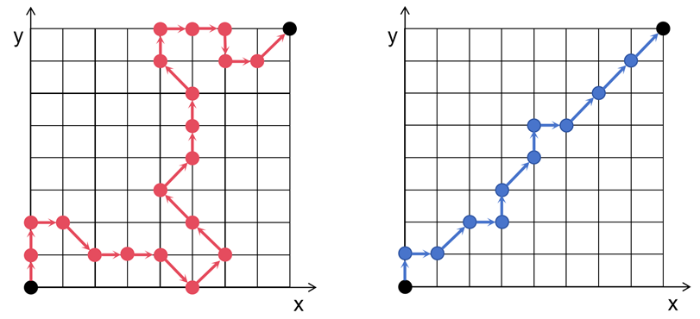
图1、 预估质量函数的效果示意图
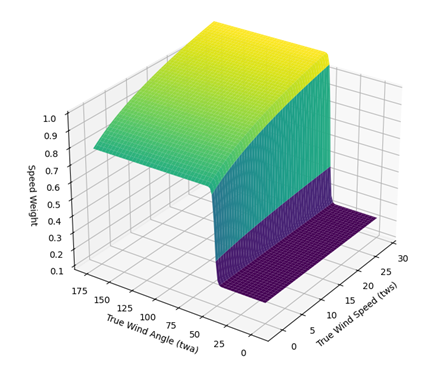
图2、权重动态变化示意图
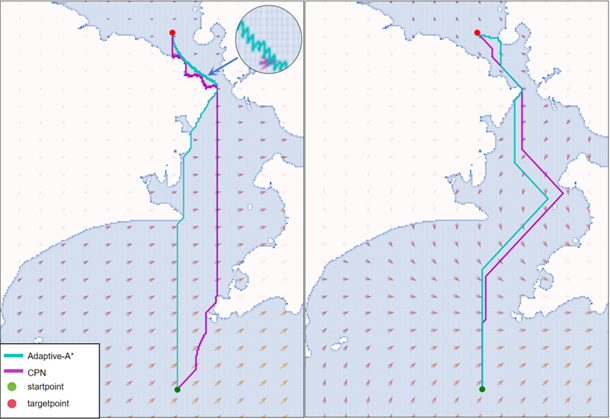
图3、混合风场环境下不同算法的规划
- 上一篇 我所科研团队在晚第四纪南极冰盖与南大洋碳循环演化研究方面取得进展 2026.04.02
- 下一篇 我所科研人员在海洋内波观测领域取得新进展 2026.04.02