

我所科研团队在无人船建模与控制研究方面取得新进展
近日,我所海洋遥感探测及应用团队在无人船建模与控制领域取得了系列研究进展,为无人船自主航行和智能控制提供了新的技术路径。研究成果分别以“Blending global linearization with local learning: a Koopman neural framework for interpretable modeling and control of USV”和“Nonparametric modeling of a high-speed USV at three speed regions based on Gaussian process regression with a hybrid kernel function”为题,发表于海洋技术领域 TOP 期刊《Ocean Engineering》。两篇论文的第一作者分别为我所联合培养硕士研究生于文灏和博士研究生丁硕,金久才副研究员为通讯作者。
近年来,无人船已广泛应用于海洋测绘、水文观测、通信中继和海上打击等。其自主航行的实现,在于建模与控制两大核心技术。然而,当前技术面临两大挑战,一是高速多航态精准建模难,高速无人船在排水、半滑行、滑行等多航行状态下,动力学特性呈现强非线性与多阶段等特点,传统物理模型难以精准适配;二是控制方法在可靠性与可解释性之间难以兼顾,基于确定性模型的控制方法鲁棒性差,而现有神经网络控制器通常缺乏物理建模,导致模型与控制的可解释性不足。
针对上述问题,团队依托自主研发的7米级高速无人船“久航750”,开展了系列航行试验,探讨解决上述物理-数据建模与学习控制关联等技术问题。

团队自主研发的7米级高速无人船“久航750”海试现场
针对现有学习型控制架构中未考虑物理建模的不足,研究团队提出了一种基于库普曼物理模型—神经网络的混合建模与控制框架,该框架具备可解释性与准确性优势,实现了复杂海洋环境下无人船的可解释与高可靠性控制,并通过跟踪对比实验,验证了所提出的控制框架优于传统非线性控制方法,为无人船安全自主航行提供了新的技术支撑。
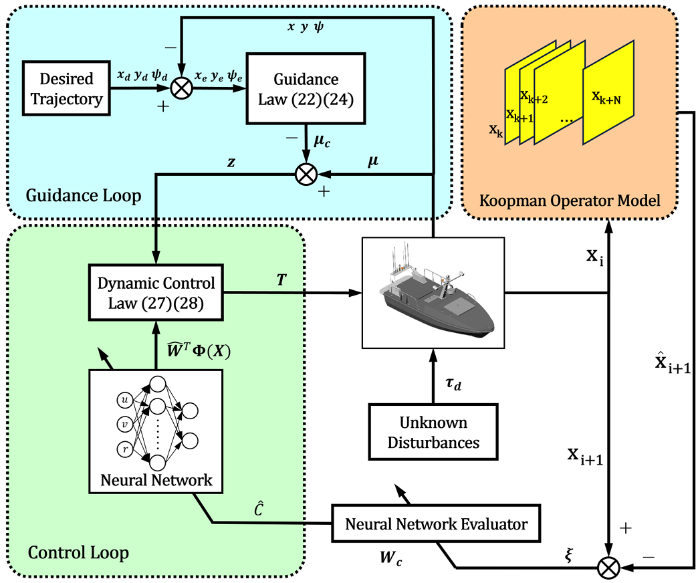
库普曼—神经网络控制结构
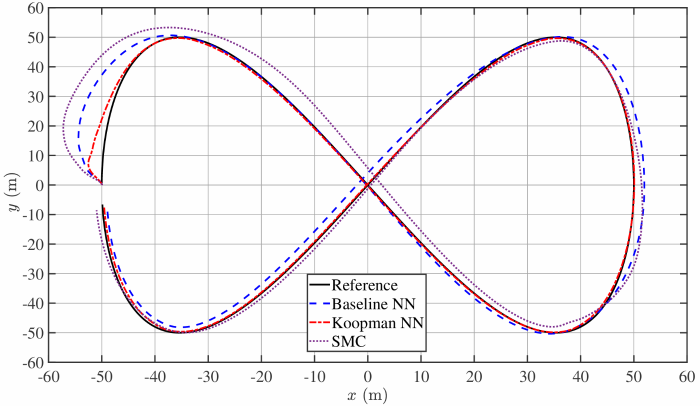
利萨茹轨迹跟踪结果对比
针对无人船低、中、高速多航态精确建模的问题,研究团队提出了一种基于混合核函数的高斯过程回归建模预报方法,使该无人船模型兼具捕捉平滑全局趋势和描述局部突变的能力,建立了适用于不同航态的无人船非参数化运动模型。实验验证了该模型精度优于传统GPR、BP和SVM等方法,为多航态无人船运动建模与预报提供了有效手段。
上述研究为无人船在复杂海洋环境下的自主航行与智能控制提供了新的建模工具与控制策略,将进一步推动无人船系统在海洋观测与作业中的应用。
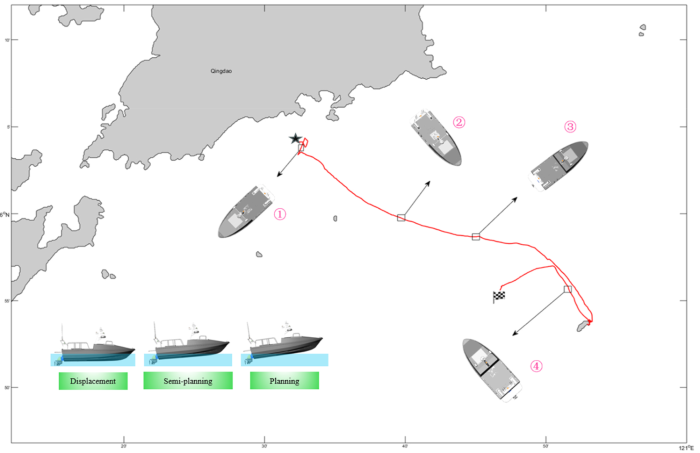
无人船海试轨迹及航态聚类
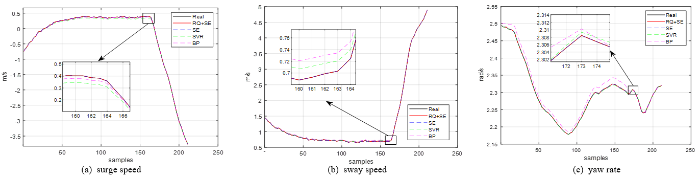
无人船运动建模预报对比
论文成果链接:
https://doi.org/10.1016/j.oceaneng.2026.124262
https://doi.org/10.1016/j.oceaneng.2024.117528
- 上一篇 《BBNJ协定》深海活动环境影响评价工作组会议在青岛顺利召开 2026.02.05
- 下一篇 中印尼巽他海峡深海生态探查研讨会举行 2026.01.26