

我所科研人员在无人帆船风场预测领域取得新进展
近日,我所海气中心技术研发人员在无人帆船风场预测领域取得了重要进展。研究基于无人帆船真实航行数据,深入分析了航行过程中风场变化趋势,并实现了对风场的短时预测。
风场是影响无人帆船航行性能与任务执行可靠性的关键环境因素,不仅决定其航速与能效,还直接关系到航迹规划与安全规避。尤其在复杂多变的海洋环境中,风速和风向往往呈现出强烈的非平稳性、随机性与区域差异性,这使得高精度、实时化的风场预测成为技术瓶颈。现有方法通常在预测精度与计算效率之间难以取得平衡:高精度模型往往推理开销较大,而轻量化方法则难以捕捉风场的细微变化。这一矛盾在很大程度上限制了无人帆船在长航时、跨海域条件下的自主化运行与任务稳定执行。
针对这一问题,研究人员提出了一种创新性的混合驱动元学习(HD-Meta)预测框架。该方法通过多模型融合与元学习机制,将不同学习器的预测结果和误差信息进行联合建模,从而在提升预测精度的同时兼顾计算效率。实验结果表明,HD-Meta 在短时风速和风向预测任务中均优于传统方法,尤其在捕捉微小风向变化方面表现突出,为无人帆船在复杂海洋环境中的自主航行提供了更加可靠的风场感知支持。
本研究成果为无人船自主航行和智能决策提供了新的技术路径,有望在海洋观测、环境监测及智能航运等领域得到广泛应用。相关研究成果以“Hybrid-Driven Meta-Learning for Wind Field Prediction in Unmanned Sailboat Applications”为题,发表于海洋技术TOP期刊《Ocean Engineering》,第一及通讯作者为海气中心正高级工程师宁春林,第二作者为我所海气中心硕士研究生聂士强。
论文链接:https://doi.org/10.1016/j.oceaneng.2025.122771
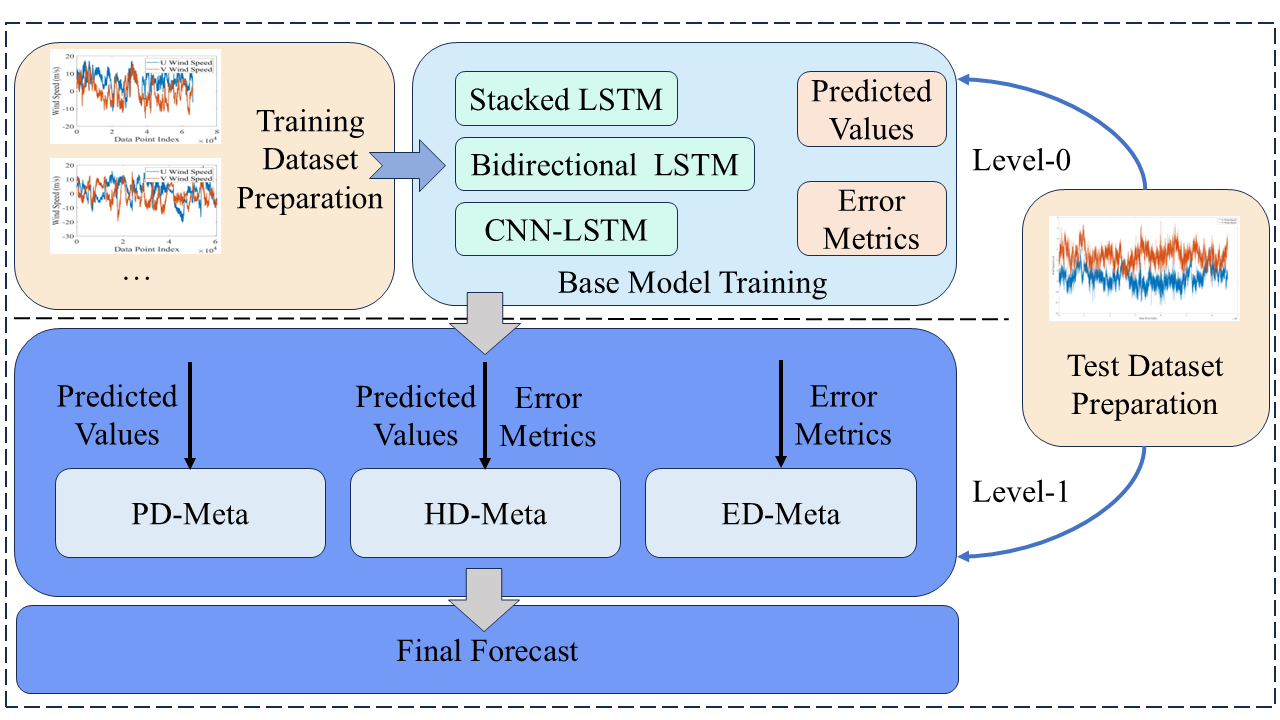
元学习预测框架示意图
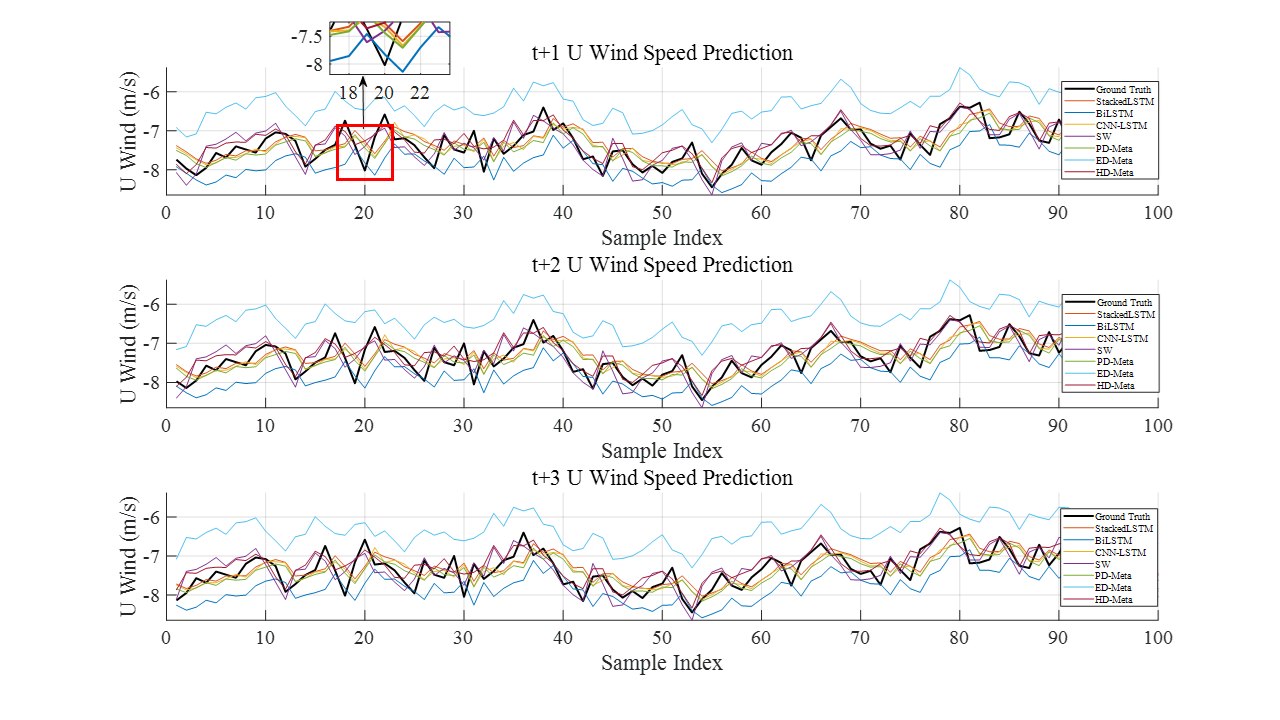
各模型 U 分量风速在 t+1~t+3 时刻的预测效果对比
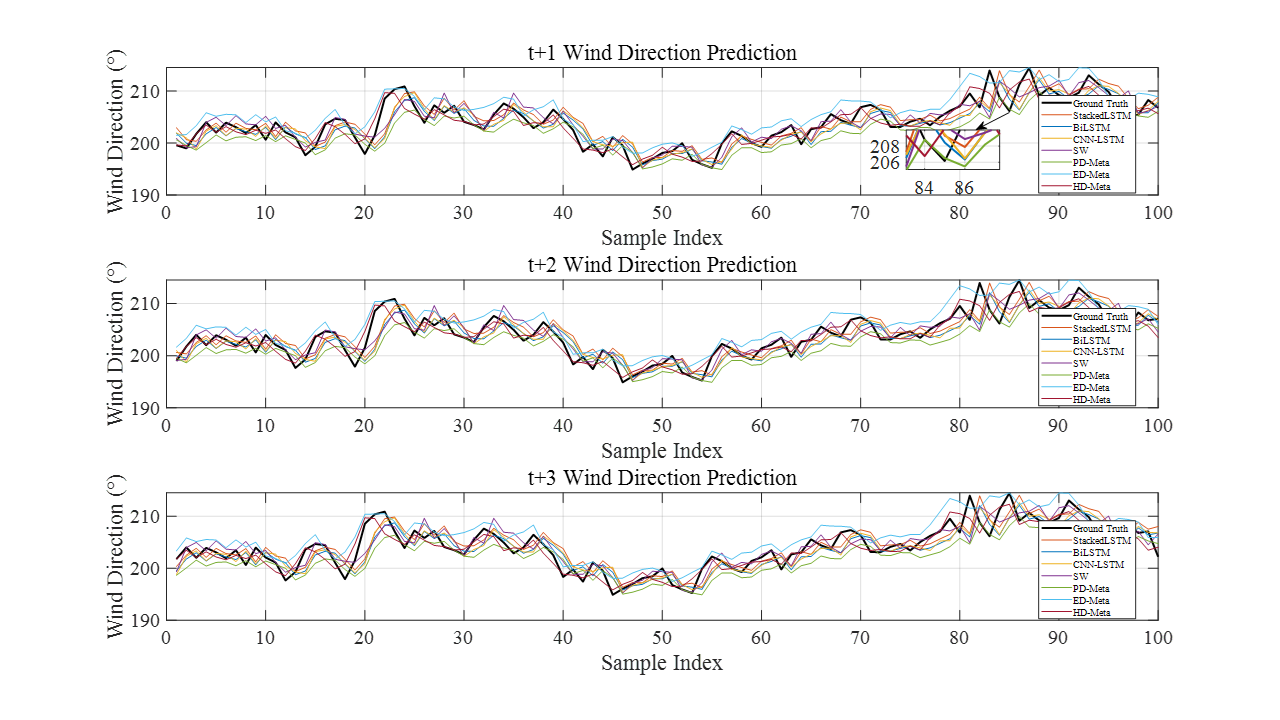
各模型 t+1~t+3 时刻风向预测效果对比
- 上一篇 2025年度中泰海岸带脆弱性联合调查顺利完成 2025.10.14
- 下一篇 我所牵头修订的《1:5 000 1:10 000 1:25 000海岸带地形图测绘规范》行业标准正式发布 2025.09.17